1. 국책 과제명
– 무인기 포획용 TOD 서라운드 방식의 자동 유도 시스템
2. 과제 수행 업체
– 씨와이뮤텍(이티알), TME(텔미전자), 국제정공
3. 개발 기술
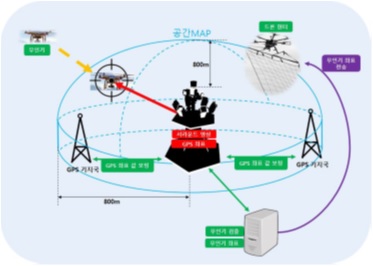
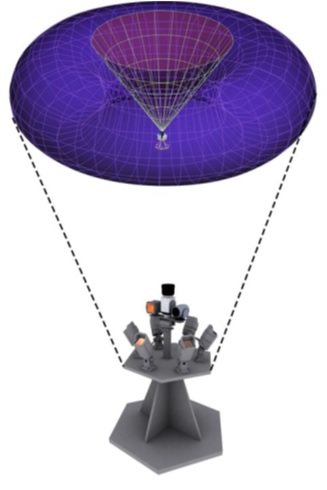
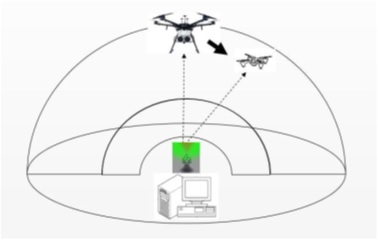
– 본 기술은 열 영상감지(Thermal Observation Device, TOD) 서라운드 카메라 기반의 수평 수평 360도, 수직 180도, 탐지거리 800m 성능을 가진 장비를 사용해 촬영한 드론의 위치를 공간 맵을 통해 실시간으로 파악하여 드론의 침입을 즉시 탐지하며 탐지된 드론을 포획하여 안전하게 처리하는 것을 특징으로 하는 무인기 포획용 자동유도 시스템이다.
4. 최종목표
– 악천후 및 야간에 멀티 TOD서라운드 카메라 위치탐지 및 GPS를 활용한 3차원공간 객체위치탐지 정보전달 및 경보 시스템.
5. 차별성 및 혁신성
– 악천후 및 야간 환경에서 수평360도/수직180도,800m 거리를 정밀하게 객체위치 인식할수 있는 세계 최고수준의 핵심기술
– 종래 초음파, 레이다, 적외선 방식의 기술적 한계를 대체할 멀티 TOD서라운드 방식의 통합기술